Introduction
Training the model
Note: The following section is adapted directly from an example from PyTorch, which you can see here.
import os
import numpy as np
import torch
import torch.utils.data
from PIL import Image
import glob
import json
import matplotlib.pyplot as plt
plt.rcParams['figure.figsize'] = [10,10]Image.open('Training_Data/TestImage1.png')
JSON = json.loads(open('Training_Data/image1.json','r').read())
for shape in JSON['shapes']:
print(shape)
print(shape['points'])class TrainingDataset(torch.utils.data.Dataset):
def __init__(self, root, transforms=None):
self.root = root
self.transforms = transforms
# load all image files, sorting them to
# ensure that they are aligned
self.imgs = list(sorted(glob.glob(root+'*.png')))
self.annotations = list(sorted(glob.glob(root+'*.json')))
def __getitem__(self, idx):
# load images ad masks
img_path = self.imgs[idx]
img = Image.open(img_path).convert("RGB")
# get bounding box coordinates for each mask
boxes = [[0.0, 0.0, 512.0, 512.0]]
labels = [0]
JSON = json.loads(open(img_path[:-4]+'.json','r').read())
num_objs = len(JSON['shapes'])
for i in range(num_objs):
shape = JSON['shapes'][i]
points = shape['points']
[[x1,y1],[x2,y2]] = points
xmin = min([x1,x2])
ymin = min([y1,y2])
xmax = max([x1,x2])
ymax = max([y1,y2])
if (xmax-xmin)*(ymax-ymin)>0:
boxes.append([xmin, ymin, xmax, ymax])
labels.append(1)
boxes = torch.as_tensor(boxes, dtype=torch.float32)
# there is only one class
labels = torch.as_tensor(labels, dtype=torch.int64)
image_id = torch.tensor([idx])
area = (boxes[:, 3] - boxes[:, 1]) * (boxes[:, 2] - boxes[:, 0])
# suppose all instances are not crowd
iscrowd = torch.zeros((len(labels),), dtype=torch.int64)
target = {}
target["boxes"] = boxes
target["labels"] = labels
target["image_id"] = image_id
target["area"] = area
target["iscrowd"] = iscrowd
if self.transforms is not None:
img, target = self.transforms(img, target)
return img, target
def __len__(self):
return len(self.imgs)import torchvision
from torchvision.models.detection.faster_rcnn import FastRCNNPredictor
def get_instance_object_detection_model(num_classes):
# load an instance segmentation model pre-trained on COCO
model = torchvision.models.detection.fasterrcnn_resnet50_fpn(pretrained = True)
# get the number of input features for the classifier
in_features = model.roi_heads.box_predictor.cls_score.in_features
# replace the pre-trained head with a new one
model.roi_heads.box_predictor = FastRCNNPredictor(in_features, num_classes)
return modelThis will prepare the model to be trained and evaluated on our custom dataset.
Training and evaluation functions
In references/detection/, we have several helper functions to simplify training and evaluating detection models. Here, we will use references/detection/engine.py, references/detection/utils.py and references/detection/transforms.py.
Let’s copy those files (and their dependencies) here so they are available in the notebook.
%%shell
# Download TorchVision repo to use some files from
# references/detection
git clone https://github.com/pytorch/vision.git
cd vision
git checkout v0.3.0
cp references/detection/utils.py ../
cp references/detection/transforms.py ../
cp references/detection/coco_eval.py ../
cp references/detection/engine.py ../
cp references/detection/coco_utils.py ../Let’s write some helper functions for data augmentation/transformation, which leverage the functions in references/detection that we have just copied:
from engine import train_one_epoch, evaluate
import utils
import transforms as T
def get_transform(train):
transforms = []
# converts the image, a PIL image, into a PyTorch Tensor
transforms.append(T.ToTensor())
if train:
# during training, randomly flip the training images
# and ground truth for data augmentation
transforms.append(T.RandomHorizontalFlip(0.5))
return T.Compose(transforms)Putting everything together
We now have the dataset class, the models and the data transforms. Let’s instantiate them.
# use our dataset and defined transformations
dataset = TrainingDataset('Training_Data/', get_transform(train=True))
dataset_test = TrainingDataset('Training_Data/', get_transform(train=False))
# split the dataset in train and test set
torch.manual_seed(1)
indices = torch.randperm(len(dataset)).tolist()
dataset = torch.utils.data.Subset(dataset, indices[:-50])
dataset_test = torch.utils.data.Subset(dataset_test, indices[-50:])
# define training and validation data loaders
data_loader = torch.utils.data.DataLoader(
dataset, batch_size=2, shuffle=True, num_workers=4,
collate_fn=utils.collate_fn)
data_loader_test = torch.utils.data.DataLoader(
dataset_test, batch_size=1, shuffle=False, num_workers=4,
collate_fn=utils.collate_fn)Now let’s instantiate the model and the optimizer.
device = torch.device('cuda') if torch.cuda.is_available() else torch.device('cpu')
# our dataset has two classes only - background and person
num_classes = 2
# get the model using our helper function
model = get_instance_object_detection_model(num_classes)
# move model to the right device
model.to(device)
# construct an optimizer
params = [p for p in model.parameters() if p.requires_grad]
optimizer = torch.optim.SGD(params, lr=0.005,
momentum=0.9, weight_decay=0.0005)
# and a learning rate scheduler which decreases the learning rate by
# 10x every 3 epochs
lr_scheduler = torch.optim.lr_scheduler.StepLR(optimizer,
step_size=3,
gamma=0.1)And now, let’s train the model for ten epochs, evaluating at the end of every epoch.
# let's train it for 10 epochs
num_epochs = 10
for epoch in range(num_epochs):
# train for one epoch, printing every 10 iterations
train_one_epoch(model, optimizer, data_loader, device, epoch, print_freq=10)
# update the learning rate
lr_scheduler.step()
# evaluate on the test dataset
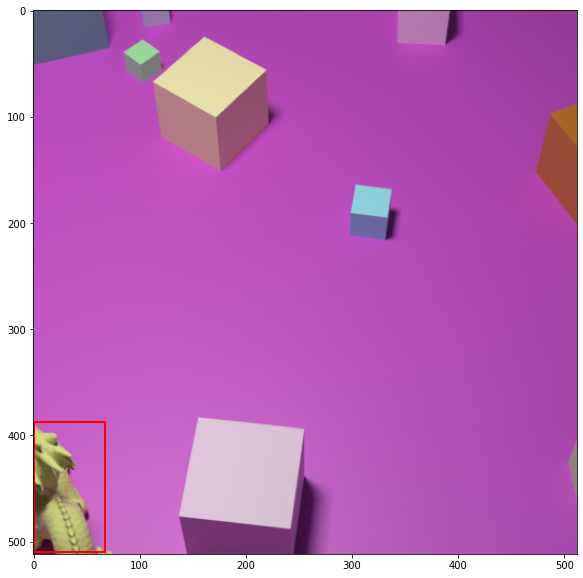
evaluate(model, data_loader_test, device=device)Now that training has finished let’s look at what it predicts in a test image.
import matplotlib.pyplot as plt
plt.rcParams['figure.figsize'] = [10,10]
for i in range(0,5):
# pick one image from the test set
img, _ = dataset_test[i]
# put the model in evaluation mode
model.eval()
with torch.no_grad():
prediction = model([img.to(device)])
for index in range(len(prediction[0]['boxes'])):
box = prediction[0]['boxes'][index]
score = prediction[0]['scores'][index]
[xmin,ymin,xmax,ymax] = box.cpu().numpy()
if score.cpu().numpy()>0.5:
plt.plot([xmin,xmax,xmax,xmin,xmin],[ymin,ymin,ymax,ymax,ymin], color='r', linewidth=2)
test_image = Image.fromarray(img.mul(255).permute(1, 2, 0).byte().numpy())
plt.imshow(test_image)
plt.show()
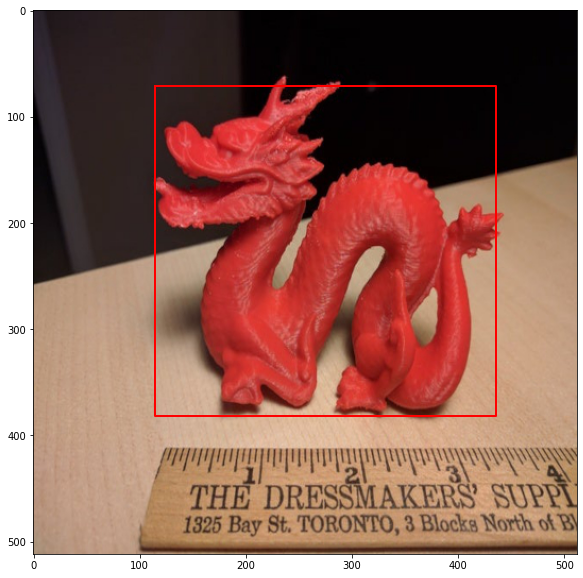
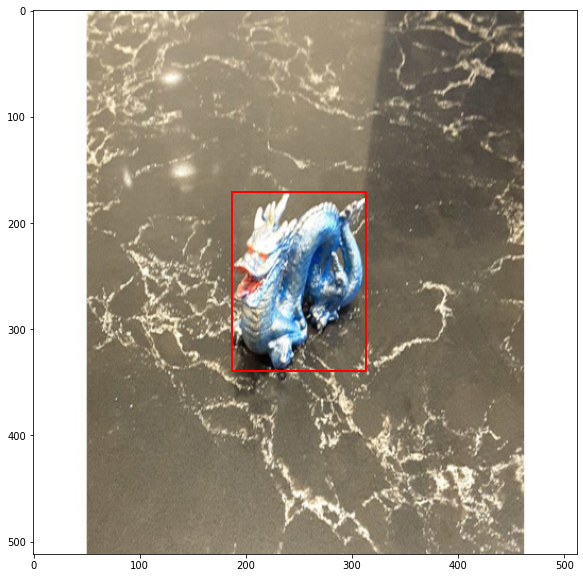
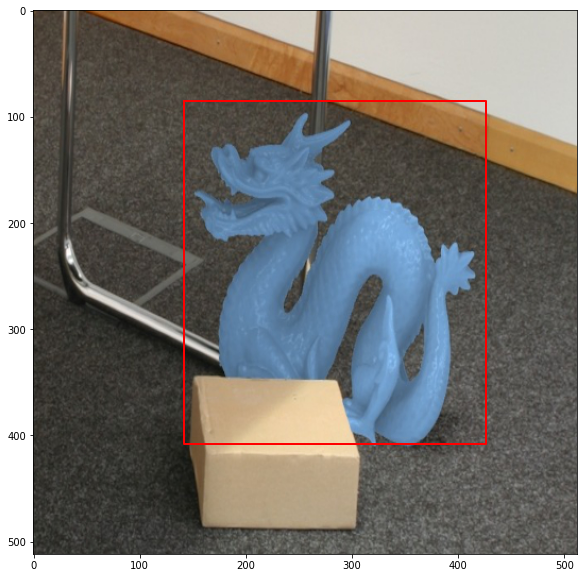
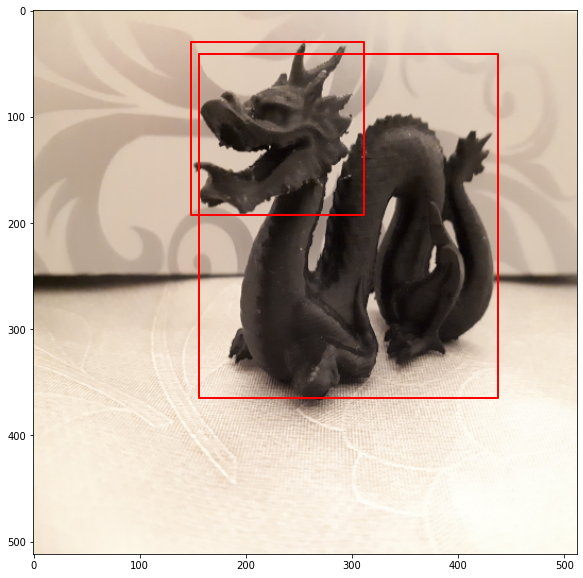
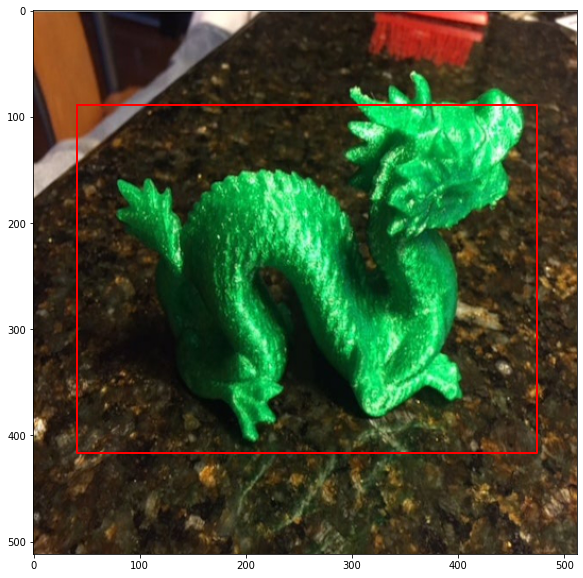
torch.save(model.state_dict(), 'Dragon_Model.tar')Results
for file_str in ['dragon1.jpeg','dragon2.jpeg','dragon3.jpeg','dragon4.jpeg','dragon5.jpeg']:
img = Image.open(file_str)
img = np.array(img)/255.0
img = torch.tensor(img,dtype=torch.float).permute(2, 0, 1)
# put the model in evaluation mode
model.eval()
with torch.no_grad():
prediction = model([img.to(device)])
for index in range(len(prediction[0]['boxes'])):
box = prediction[0]['boxes'][index]
score = prediction[0]['scores'][index]
[xmin,ymin,xmax,ymax] = box.cpu().numpy()
if score.cpu().numpy()>0.95:
plt.plot([xmin,xmax,xmax,xmin,xmin],[ymin,ymin,ymax,ymax,ymin], color='r', linewidth=2)
test_image = Image.fromarray(img.mul(255).permute(1, 2, 0).byte().numpy())
plt.imshow(test_image)
plt.show()