Training object detection models on synthetic data
Can we train an object detection model on synthetically generated data?



An Introduction to Augmented Reality
Let’s look at the mathematics behind augmented reality.

Number extraction with Tesseract
We use Tesseract to capture numbers from an image.


The Log Polar Transform
How to use the Log Polar Transform to find the relative rotation between two images.

FFT Phase Correlation
How to use FFT Phase Correlation to find the relative translation between two images.




Materials and meshes in Blender
I want to dig deeper into materials and import meshes in this post.

Robotic Blender
Let’s learn how we can create synthetic imagery for training machine learning models.


How often do Afterpay’s customer’s default? (Part 6)
I want to take a step back and discuss what we have learned so far and what I think the next steps could be.

How often do Afterpay transactions attract late fees? (Part 5)
Let’s take a high-level view of how often Afterpay customers pay late, based on Afterpay’s FY2019 Annual report.

How often do Afterpay transactions attract late fees? (Part 4)
Afterpay has just released its 2020 annual report, and it includes two new and exciting pieces of information.

How often do Afterpay transactions attract late fees? (Part 3)
Let’s take a high-level view of how often Afterpay customers pay late, based on Afterpay’s FY2019 Annual report.

How often do Afterpay transactions attract late fees? (Part 2)
Let’s take a high-level view of how often Afterpay customers pay late, based on Afterpay’s FY2019 Annual report.

How often do Afterpay transactions attract late fees? (Part 1)
Let’s take a high-level view of how often Afterpay customers pay late, based on Afterpay’s FY2019 Annual report.
Modelling Afterpay’s customer growth
How can we model the growth in Afterpay’s customer base?

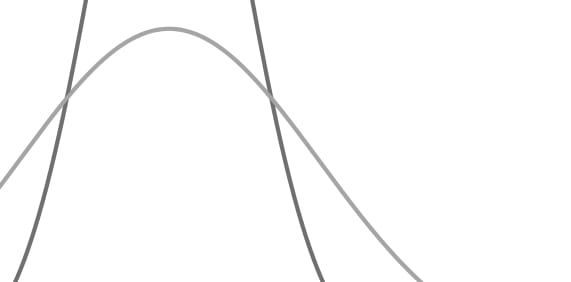
Bayesian Camera Calibration
Let’s look and how we can use PyMC3 to help us improve our aim.

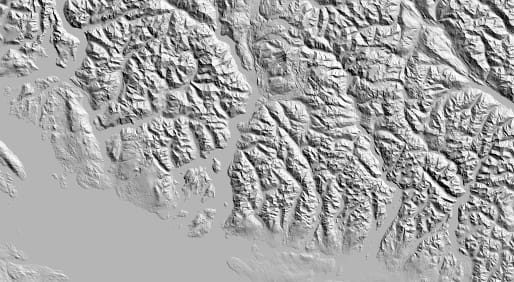
Vanishing points in practice
Let’s apply some of the techniques from previous points to a real-world problem.
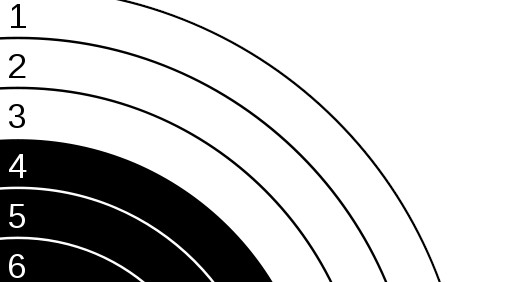
On Target With PyMC3
Let’s look and how we can use PyMC3 to help us improve our aim.


R From Vanishing points
Let’s use our vanishing points to estimate a camera rotation matrix (R).

K From Vanishing points
Let’s use our vanishing points to estimate a camera calibration matrix (K)

Finding Vanishing Points
Let’s look at how to find a vanishing point mathematically.
Inverse Radial Distortion
How to find the inverse of a radial distortion function.

RQ Decomposition In Practice
How to use RQ Decomposition to recover your camera’s K, R and C matrices.
An Adventure in Camera Calibration
Let’s learn how to use a set of known 2D and 3D point correspondences to calibrate a camera